- سبک زندگی یاهو
- علم در بازی: نشانگر آب کلم قرمز
- در اینجا آمده است که چگونه می توانید رمزنگاری خود را از binance به metamask منتقل یا پس بگیرید
- حق بیمه ریسک بازار
- RT Active Global Trend t
- صرافی های متمرکز و غیرمتمرکز ارزهای دیجیتال - مقایسه!
- عمق بازار فارکس ، ابزاری مفید برای معامله گران فارکس
- فرا گرفتن. خودکارتجارت مستر
- صف به quaff؟همه گیر برای انحصار مشروبات الکلی ایالت سوئد مشکل ایجاد می کند
- نمونه موارد تست - معاملات سهام چند بازاری

آخرین مطالب
امکانات وب


این الگوریتم های Toolbox System Robotics روی روباتیک تلفن همراه یا برنامه های کاربردی وسیله نقلیه زمینی تمرکز دارند. این الگوریتم ها به شما در کل گردش کار رباتیک موبایل از نقشه برداری تا برنامه ریزی و کنترل کمک می کنند. شما می توانید با استفاده از شبکه های اشغال ، نقشه های محیط را ایجاد کنید ، الگوریتم های برنامه ریزی مسیر را برای روبات ها در یک محیط معین تهیه کنید و کنترل کننده های تنظیم شده را دنبال کنید تا مجموعه ای از ایستگاه های راه را دنبال کنید. تخمین حالت را بر اساس داده های سنسور Lidar از ربات خود انجام دهید.
کارکرد
نقشه برداری
| باینکوسپنسی مپ | شبکه اشغال را با مقادیر باینری ایجاد کنید |
| شغلی | ارزش اشغال مکان ها را بدست آورید |
| باد کردن | هر مکان اشغالی را باد کنید |
| حرکت | نقشه را در قاب جهانی حرکت دهید |
| شغلی | تبدیل شبکه اشغال به ماتریس |
| پرتو | شاخص های سلولی را در امتداد پرتوی محاسبه کنید |
اسکن لیزر
| لیدارسن | برای ذخیره اسکن 2-D LiDAR شیء ایجاد کنید |
| طرح | نمایش خوانش لیزر یا لیدر اسکن |
| removeinvaliddata | دامنه و زاویه نامعتبر را حذف کنید |
| تغییر دهنده | اسکن لیزر را بر اساس ژست نسبی تبدیل کنید |
بومی سازی
| دولتمار | برآوردگر حالت فیلتر ذرات ایجاد کنید |
| شروع کردن | حالت فیلتر ذرات را اولیه کنید |
| پیش بینی | پیش بینی وضعیت ربات در مرحله بعدی |
| درست | تخمین حالت را بر اساس اندازه گیری سنسور تنظیم کنید |
| getStateStimate | برآورد بهترین حالت و کواریانس را از ذرات استخراج کنید |
برنامه ریزی مسیر و زیر
| MobilerObotPrm | برنامه ریز مسیر نقشه راه احتمالی را ایجاد کنید |
| مسیر یابی | مسیر بین نقاط شروع و هدف را در نقشه راه پیدا کنید |
| ControlerPurePursuit | برای دنبال کردن مجموعه Waypoints ، کنترلر ایجاد کنید |
مدل های حرکتی سینماتیک
| عکسبرداری | مدل وسیله نقلیه فرمان مانند ماشین |
| دوچرخه سواری | مدل وسیله نقلیه دوچرخه |
| دیفرانسیل | مدل وسیله نقلیه درایو دیفرانسیل |
| یکپارچه | مدل وسیله نقلیه یک چرخه |
بلوک
| مدل سینماتیک ACKERMANN | حرکت خودرو مانند ماشین با استفاده از مدل سینماتیک Ackermann |
| مدل سینماتیک دوچرخه | حرکت خودرو مانند ماشین را با استفاده از مدل سینماتیک دوچرخه محاسبه کنید |
| مدل سینماتیک درایو دیفرانسیل | حرکت وسیله نقلیه را با استفاده از مدل سینماتیک درایو دیفرانسیل محاسبه کنید |
| مدل سینماتیک یک چرخه | حرکت وسیله نقلیه را با استفاده از مدل سینماتیک یک چرخه محاسبه کنید |
| پیگیری خالص | دستورات کنترل سرعت خطی و زاویه ای |
موضوعات موضوعاتی
نقشه برداری و برنامه ریزی مسیر
- شبکه های اشغال جزئیات عملکرد شبکه اشغال و ساختار نقشه.
- نقشه راه های احتمالی (PRM) نحوه عملکرد الگوریتم PRM و پارامترهای تنظیم خاص.
- برنامه ریزی مسیر در محیط هایی با پیچیدگی های مختلف این مثال نشان می دهد که چگونه می توان یک مسیر بدون مانع را بین دو مکان روی یک نقشه معین با استفاده از نقشه برداری مسیر احتمالی (PRM) محاسبه کرد.
- نقشه برداری با شناخته شده این مثال نشان می دهد که چگونه می توان نقشه ای از محیط را با استفاده از خوانش سنسور دامنه و پینت های ربات برای یک ربات درایو دیفرانسیل ایجاد کرد.
- مسیر برنامه برای یک ربات درایو دیفرانسیل در Simulink این مثال نشان می دهد که چگونه می توان یک مسیر بدون مانع را بین دو مکان در یک نقشه معین در Simulink® اجرا کرد.
مدل سازی حرکت
- معادلات Kinematics Robot Mobile جزئیات مربوط به معادلات Kinematics Robot Mobile از جمله یک چرخه ، دوچرخه ، درایو دیفرانسیل و مدل های Ackermann را می آموزند.
- این مثال مدل های مختلف سینماتیک را برای روبات های تلفن همراه شبیه سازی کنید.
کنترل ربات
- کنترلر PURE PULUIT CONTROLLER PURE PURCUIT CONTROLLER و جزئیات الگوریتم.
- مسیر پیروی از یک ربات درایو دیفرانسیل این مثال نشان می دهد که چگونه می توان یک ربات را کنترل کرد تا یک مسیر مورد نظر را با استفاده از یک شبیه ساز ربات دنبال کند.
- کنترل ربات درایو دیفرانسیل در Gazebo با Simulink این مثال نشان می دهد که چگونه می توان یک ربات درایو دیفرانسیل را در تصویربرداری Gazebo با استفاده از Simulink کنترل کرد.
تخمین دولت
- پارامترهای فیلتر ذرات برای استفاده از فیلتر ذرات StateSimatorPF ، باید پارامترهایی مانند تعداد ذرات ، محل ذرات اولیه و روش تخمین حالت را مشخص کنید.
- جریان کار فیلتر ذرات یک فیلتر ذرات یک برآوردگر حالت بازگشتی و حالت بیزی است که از ذرات گسسته برای تقریب توزیع خلفی حالت تخمین زده شده استفاده می کند.
- ردیابی یک ربات شبیه به ماشین با استفاده از فیلتر ذرات ذرات یک الگوریتم تخمین بازگشتی مبتنی بر نمونه برداری ، که در شیء StateStimatorPF اجرا می شود.
نمونه های برجسته
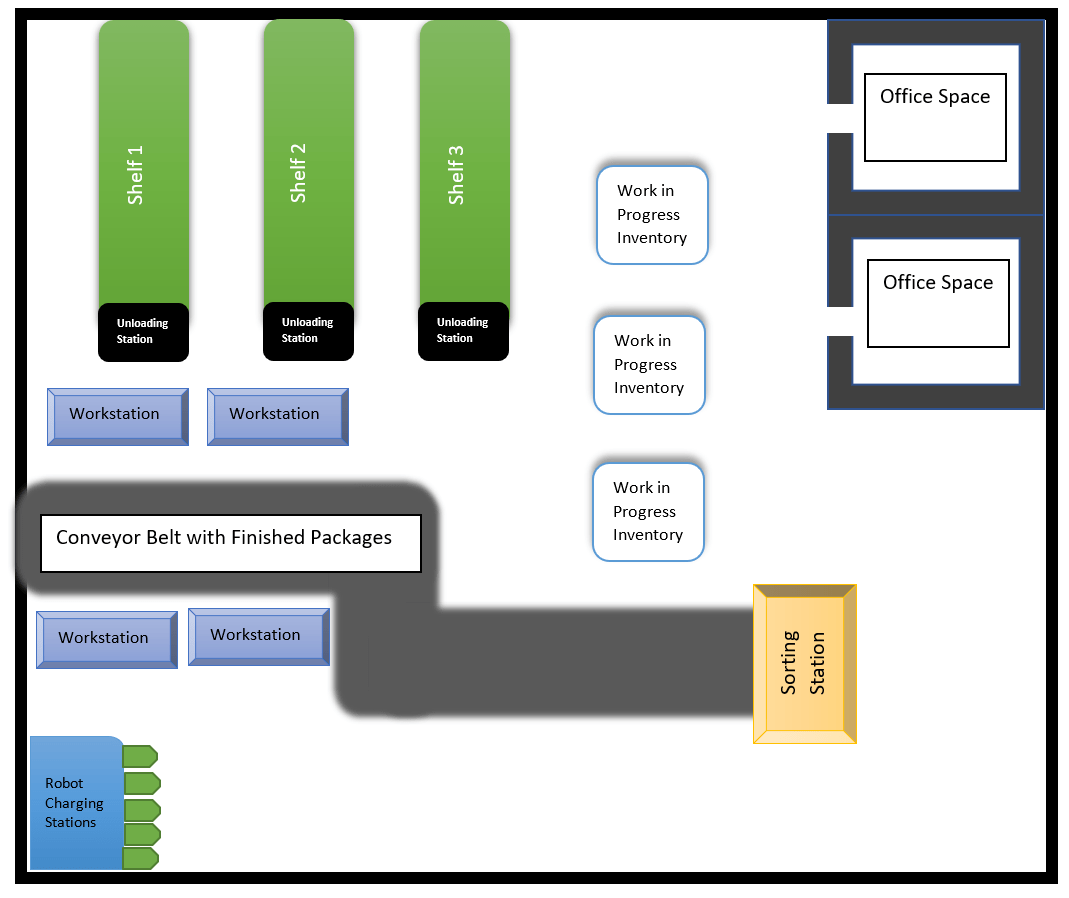
کنترل چند ربات با تخصیص منابع و مدیریت درگیری
چندین روبات را که در یک مرکز توزیع کار می کنند ، و همچنین نحوه پیکربندی یک سیستم توزیع را کنترل کنید. روبات ها در حالی که الگوریتم های تئوری بازی را به کار می گیرند ، به تسهیلات می پردازند و چندین کار را انجام می دهند تا بهینه سازی تخصیص کار بین روبات ها و حل تعارض با استفاده از یک مدیر ترافیک مبتنی بر شبکه انجام شود. این مثال بر روی اطلاعات تحت پوشش در کنترل و شبیه سازی چندین روبات ، که چندین روبات در اطراف یک مرکز مشابه حرکت می کند ، ساخته شده است ، اما این مثال از الگوریتم های سفارشی استفاده می کند.
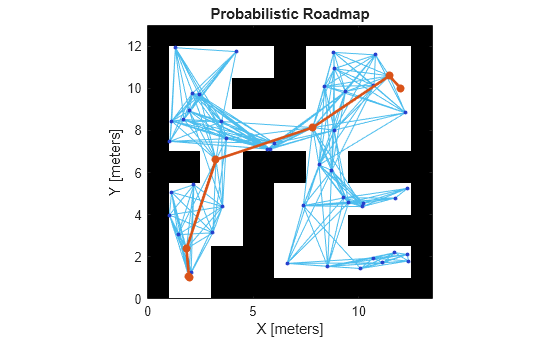
برنامه ریزی مسیر در محیط هایی با پیچیدگی های مختلف
نحوه محاسبه یک مسیر بدون مانع بین دو مکان در یک نقشه معین با استفاده از نقشه برداری مسیر احتمالی (PRM) را نشان می دهد. PRM Path Planner با استفاده از گره های نمونه به طور تصادفی در فضای آزاد ، نقشه راه را در فضای آزاد یک نقشه معین ایجاد می کند و آنها را با یکدیگر وصل می کند. پس از ساخت نقشه راه ، می توانید برای مسیری از یک مکان شروع معین به یک مکان انتهایی معین روی نقشه ، پرس و جو کنید.
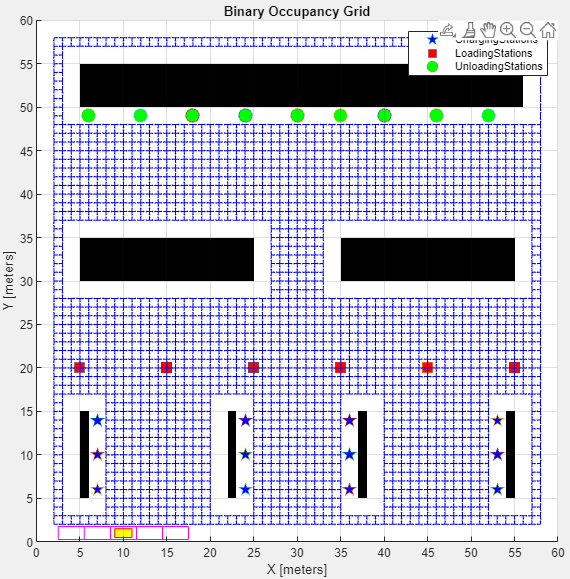
وظایف یک روبات انبار را اجرا کنید
نحوه اجرای یک مسیر بدون مانع را برای یک ربات موبایل بین سه مکان در یک نقشه معین نشان می دهد. پیش بینی می شود این ربات از سه مکان در یک انبار بازدید کند: ایستگاه شارژ ، ایستگاه بارگیری و مکان تخلیه. دنباله ای که در آن از این مکان ها بازدید می شود توسط یک برنامه ریز دیکته می شود. برنامه ریز به هر ربات یک هدف برای حرکت در اختیار هر ربات قرار می دهد. این ربات یک مسیر را برنامه ریزی می کند و از یک کنترلر پیگیری خالص برای پیگیری نقاط راه مبتنی بر موقعیت فعلی ربات استفاده می کند. بلوک مدل سینماتیک درایو دیفرانسیل ، سینماتیک ساده شده را مدل می کند ، که سرعت خطی و زاویه ای را از کنترلر پیگیری خالص می گیرد. این مثال در بالای مسیر برنامه برای یک ربات دیفرانسیل در مثال Simulink ساخته شده است.
بهترین استراتژی معاملات...
ما را در سایت بهترین استراتژی معاملات دنبال می کنید
برچسب :
نویسنده : صدرا ذوالریاستین
بازدید : 29
